 ModelleisenbahN
ModelleisenbahNComme le prototypage pour le pilotage du pont tournant a été fait avec un Arduino, j’ai décidé de faire 2 cartes de pilotage. Une première intégrant un Arduino Nano [1] et une DRV8824 et une seconde intégrant un PIC 18F26K80 et la même DRV8824. La première carte servira de carte de développement des algorithmes et de matériel pédagogique pour les Arduino. Elle sera commandée via des poussoirs. Quand elle me sera devenue inutile, il est possible que je la vende. La seconde sera intégrée sur mon réseau, permettant ainsi de piloter le pont via le bus CAN des accessoires.
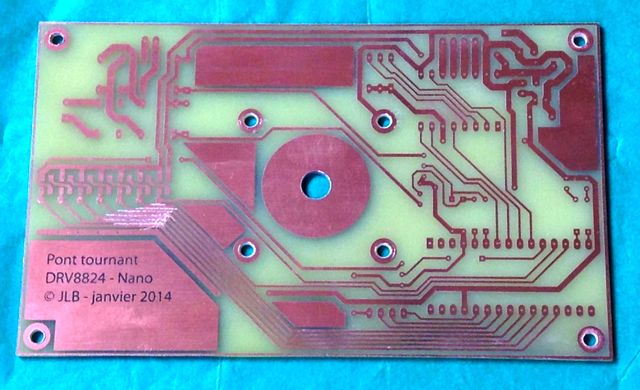
La carte est tirée et il me reste à percer les trous pour placer et souder les composants. J’ai eu un petit soucis de gravure, j’utilise deux transparents superposés qui malheureusement se sont mal superposés sur cette insolation [2], mais j’ai pu récupérer les pistes collées avec un couteau de modéliste. Ce n’est pas très joli mais l’isolation électrique est bonne.
Un article de description de cette carte suivra, bien entendu.