ModelleisenbahN
ModelleisenbahNDans les plans initiaux, le bus CAN traction ainsi que les autres signaux qui interconnectent le contrôleur central aux cartes 4 alimentations est porté par une nappe de 14 conducteurs au pas de 1,27mm. Cette nappe comporte donc 3 paires de conducteurs pour véhiculer en différentiel :
- le bus CAN traction
- le signal de synchronisation des PWM
- le signal de synchronisation de la mesure de vitesse
Les 8 autres conducteurs sont alloués à l’alimentation des transceivers CAN, qui sont découplés de l’alimentation du reste de la carte, à raison de 5 conducteurs pour la masse et 3 conducteurs pour le +9V. La nappe est sertie dans un connecteur femelle HE10 qui vient s’enficher dans le connecteur mâle de la carte.
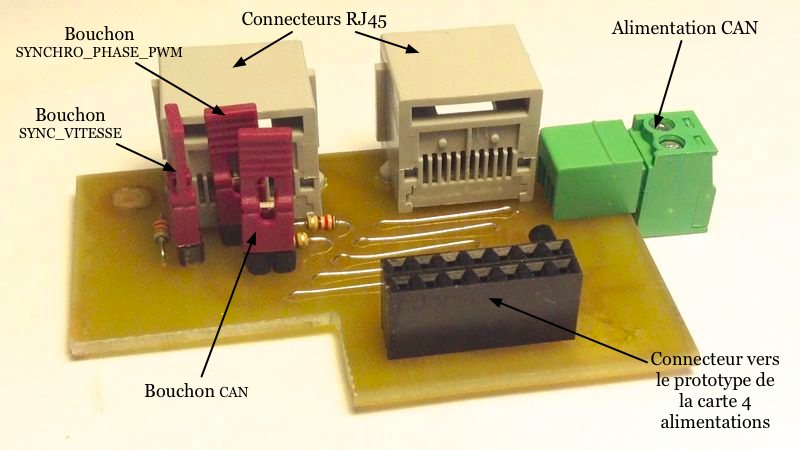
Au cours des essais de mise au point des alimentations traction et une fois éliminés et corrigés tous les problèmes logiciels et matériels, il restait des soucis d’erreurs sur le bus CAN. Quelques investigation côté logiciel ont montré que le problème ne venait pas forcement de là et les soupçons se sont portés sur la nappe. Quelques remplacements par une autres nappe, inversion de sens, tortillage plus tard, la coupable était trouvée. Elle avait pourtant été réalisée avec soin mais la fiabilité n’est pas suffisante.
Nous avons donc décidé de remplacer la connectique HE10 avec nappe de 14 conducteurs par du RJ45 et du câble ethernet classique 8 conducteurs. Ces câbles sont largement disponibles, à un coût négligeable, sont câblés en paires torsadées et offrent une bande passante bien supérieure à nos besoins. Seuls 6 conducteurs sont employés pour les signaux. L’alimentation est maintenant délivrée séparément.