 ModelleisenbahN
ModelleisenbahNNous allons maintenant examiner les deux types de conduction. Les formules et équations seront données en annexe dans un prochain article.
Pour simplifier on va considérer un hachage dont le rapport cyclique est de 50%. C’est à dire que l’interrupteur est fermé autant de temps qu’il est ouvert. Comme ceci :
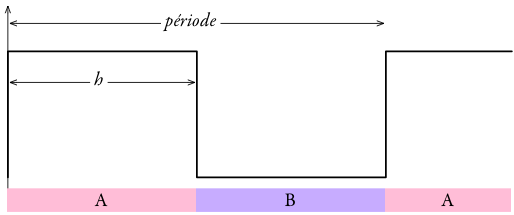
On rappelle les grandeurs que l’on utilise :
- U0 est la tension d’alimentation ;
- E est la force contre-électromotrice du moteur ;
- VD est la tension de seuil de la diode.
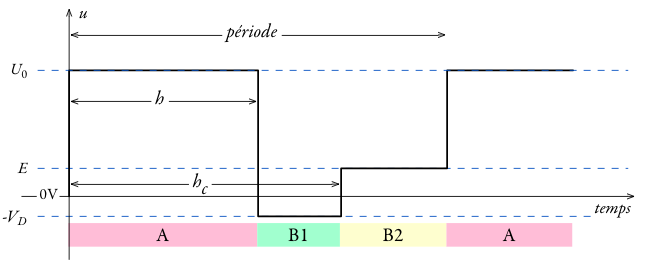
La conduction discontinue
La conduction discontinue correspond au cas où la fréquence de hachage est suffisamment faible pour que le courant dans le moteur ait le temps d’atteindre sa valeur maximum quand l’interrupteur est fermé et le temps de retomber à 0 quand l’interrupteur est ouvert.
Quand on mesure la tension aux bornes du moteur, on obtient ceci :
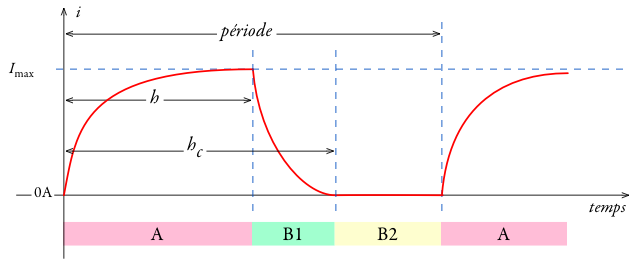
Si on mesure le courant qui circule dans le moteur, on obtient ceci :
La conduction continue
La conduction continue correspond au cas où la fréquence de hachage est suffisamment élevée pour que le courant dans le moteur n’ait pas le temps d’atteindre sa valeur maximum quand l’interrupteur est fermé ni le temps de devenir nul quand l’interrupteur est ouvert.
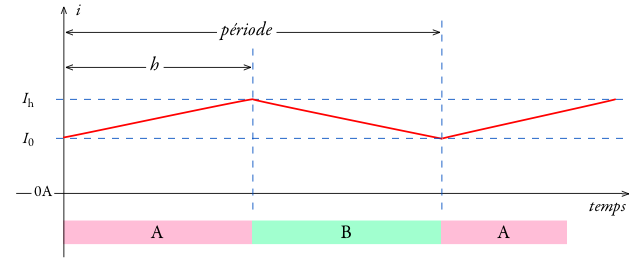
Comme le courant n’a pas le temps de s’annuler, la diode roue libre conduit pendant tout le temps où l’interrupteur est ouvert et la tension aux bornes du moteur varie comme ceci :
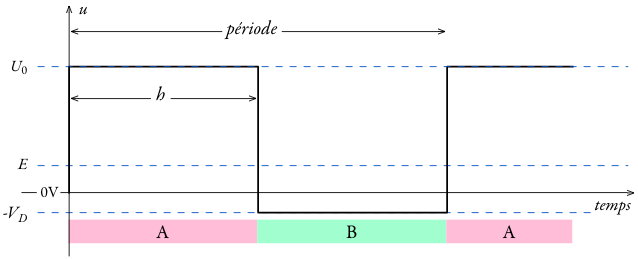
En conduction continue, la force contre-électromotrice n’apparaît pas aux bornes du moteur.
Le courant i dans le moteur, valant I0 au moment où l’interrupteur se ferme, croît exponentiellement jusqu’à atteindre la valeur Ih au bout de h ; en pratique, la constante de temps permet d’assimiler cette exponentielle à un segment de droite. Quand l’interrupteur se ferme, le courant décroît exponentiellement jusqu’à I0 ; en fait, pour la même raison, c’est aussi un segment de droite.
Quelques résultats
D’abord le moteur est caractérisé par deux grandeurs, sa résistance R et son inductance L. Pour la locomotive à l’échelle N précédente (Roco BR 80), R = 13Ω, et une mesure directe de l’inductance donne L = 0,59mH.
Ensuite, il nous faut un point de fonctionnement comme base de calcul. Nous prenons celui présenté dans le premier article ainsi, nous pourrons faire des comparaisons directes des résultats obtenus. Voici un rappel de ce point de fonctionnement.
La locomotive tracte huit wagons sous une tension de 7,5V et consomme un courant d’environ 355mA.
On en déduit :
- le fcem du moteur : 7,5V - 13Ω × 355mA = 2,89V ;
- la puissance électrique : 7,5V × 355mA = 2,66W ;
- la puissance mécanique fournie : 2,89V × 355mA = 1,02W ;
- les pertes par effet Joule : 13Ω × 355mA × 355mA = 1,64W.
Si une tension hachée déplace la locomotive à la même vitesse pour la même charge que la tension continue, alors :
- la fcem, qui dépend que de la vitesse de rotation du moteur, est la même : 2,89V ;
- la puissance mécanique du moteur est la même : on en déduit que la valeur moyenne Imoy du courant haché est égale à la valeur du courant continu (355mA), et ceci que la conduction soit continue ou non.
Fréquence limite de conduction continue
Il s’agit de la fréquence de la PWM telle que la conduction cesse d’être discontinue et devient continue pour différentes tensions d’alimentation. La tension de seuil de la diode roue libre VD est fixée à 0,6V.
| U0 | Fréquence limite pour VD=0,6V |
| 9V | 3 492 Hz |
| 12V | 7 434 Hz |
| 15V | 9 331 Hz |
| 18V | 10 573 Hz |
| 20V | 11 192 Hz |
Pour calculer les pertes par effet Joule des deux modes de conduction, on va fixer la fréquence de la PWM bien en dessous de ce seuil pour la conduction discontinue et bien au dessus de ce seuil pour la conduction continue.
Dans les tableaux qui suivent, on va s’intéresser aux valeurs de :
- h : le rapport cyclique de la PWM ;
- Imax : le courant maximum dans le moteur ;
- hc : le temps en % de la période de la PWM au bout duquel le courant devient nul ;
- Pc : la puissance moyenne consommée par le moteur ;
- PJd : la puissance dissipée dans la diode par effet Joule ;
- PJm : la puissance dissipée dans le moteur par effet Joule.
Conduction discontinue
En conduction discontinue, on considère deux fréquences de hachage, 100Hz et 500Hz, et 3 tensions U0 d’alimentation.
| Fréquence de la PWM | U0 | h | Imax | hc | Pc | PJd | PJm |
| 100Hz | 9V | 75.8% | 470mA | 76.3% | 3.19W | 0.00W | 2.16W |
| 500Hz | 9V | 76.8% | 470mA | 79.1% | 3.15W | 0.01W | 2.12W |
| 100Hz | 12V | 50.9% | 701mA | 51.5% | 4.24W | 0.00W | 3.21W |
| 500Hz | 12V | 51.8% | 701mA | 54.7% | 4.16W | 0.01W | 3.13W |
| 100Hz | 15V | 38.3% | 932mA | 39.0% | 5.29W | 0.00W | 4.26W |
| 500Hz | 15V | 39.1% | 932mA | 42.5% | 5.14W | 0.01W | 4.11W |
On voit que la tension hachée basse fréquence alliée à une source de tension élevée est très stressante pour le moteur : à 100Hz sous 12V, les pertes Joules (et donc l’échauffement du moteur) sont presque 2 fois plus élevées qu’en tension continue. À 100Hz sous 15V, les pertes Joules sont 2,6 fois celles du fonctionnement sous tension continue !
On voit aussi qu’augmenter la fréquence de hachage diminue les pertes par effet Joule. Dans tous les cas, les pertes par effet Joule dans la diode sont très faibles.
Conduction continue
En conduction continue, on considère également 2 fréquences de hachage, 20kHz et 40kHz, et 3 tensions U0 d’alimentation. Le 32kHz et 12V ont été ajoutés car c’est ce que nous utilisons dans les cartes 4 alimentations [1].
| Fréquence de la PWM | U0 | h | I0 | Ih | Pc | PJd | PJm |
| 20kHz | 12V | 64.3% | 229mA | 469mA | 2.80W | 0.07W | 1.70W |
| 32kHz | 12V | 64.3% | 277mA | 428mA | 2.76W | 0.07W | 1.66W |
| 40kHz | 12V | 64.3% | 292mA | 414mA | 2.76W | 0.08W | 1.65W |
| 20kHz | 20V | 39.3% | 159mA | 566mA | 2.97W | 0.12W | 1.82W |
| 20kHz | 25V | 31.7% | 141mA | 600mA | 3.04W | 0.14W | 1.87W |
Les résultats parlent d’eux-mêmes : sous 20kHz et 12V, les pertes Joules sont de 1,70W, quasiment égales aux pertes en continu qui rappelons le sont de 1,64W. Sous 25V à la même fréquence, les pertes Joules sont inférieures à celles sous 9V à 100Hz.
Et les moteurs à rotor sans fer dans tout cela
Hormis une construction mécanique différente, ces moteurs sont caractérisés par une inductance plus faible et une inductance plus faible va conduire à l’augmentation du courant efficace et donc augmenter les pertes par effet Joule en conduction discontinue. De plus, et c’est particulièrement vrai à l’échelle N, les moteurs sont plus petits et dissipent moins bien la chaleur. Par ailleurs, étant plus petits, il ont une résistance plus forte. Ainsi le moteur Faulhaber 1016N012G de 10mm de Ø a une résistance de 95Ω [2]. Un moteur plus gros, le Faulhaber 2224SR012 de 22mm de Ø a une résistance de 8,71Ω [3].
Pour toutes ces raisons, il est important de réduire les pertes par effet Joule au minimum pour les petits moteurs et spécialement pour les moteurs à rotor sans fer.
Mais alors pourquoi trouve-t-on dans le commerce ou en construction amateur des alimentation basse fréquence ?
Hacher à basse fréquence permet d’obtenir d’excellents ralentis. En effet, comme la conduction est discontinue, le courant atteint sa valeur maximum et par conséquent le couple instantané est important et donc le ralenti est meilleur. Il est d’autant meilleur que la tension en importante puisqu’elle conduira à un courant plus fort [4].
Mais ces alimentations sont stressantes pour les petits moteurs et les moteurs à rotor sans fer.
Conclusion
D’un point de vue énergétique, la tension continue pure est la meilleure : elle minimise les pertes Joule. Cependant, elle présente à mon avis deux défauts :
- elle ne permet pas d’obtenir de bons ralentis ;
- si elle minimise les pertes Joule dans le moteur, celles dans le transistor de puissance qui n’est pas en régime saturé sont importantes, ce qui impose un radiateur de forte dimension.
À mon avis, la meilleure solution est la tension hachée en conduction continue (le transistor fonctionne en commutation). Elle impose au moteur une surchauffe minime. Il faut se placer largement au dessus de la fréquence limite, en vérifiant que le transistor de commutation et l’alimentation puissent suivre à la fréquence choisie. De plus, choisir une fréquence au delà des fréquences audibles est souhaitable.
Évidemment, la tension hachée en conduction continue présente le même défaut qu’une tension continue pure, la mauvaise qualité des ralentis.
Ce défaut disparaît si le rapport cyclique est asservi à la vitesse réelle. La vitesse de la locomotive n’est pas le résultat d’une PWM choisie par le conducteur. La vitesse est une consigne de fcem. L’alimentation interrompt périodiquement la PWM afin de mesurer la fcem. Si la fcem mesurée est plus petite que la consigne, on augmente la PWM, si elle est plus grande on diminue la PWM [5]. De cette manière, la PWM est adaptée en permanence de manière à conserver une vitesse constante. Cette régulation joue aussi le rôle de compensation de charge et fait que quelle que soit [6] la pente ou la rame tractée, la vitesse sera celle voulue par la consigne.
Messages
25 septembre 2013, 11:15
Bravo pour cette série d’articles sur le PWM !
Le second est particulièrement clair et c’est la 1ère fois que je lis une explication rationnelle sur l’échauffement des moteurs en PWM.
Meilleures salutations.
Voir en ligne : http://savignyexpress.wordpress.com
2 octobre 2013, 10:53, par Jean-Luc
Merci ! J’ai pensé à toi Savigny pour les équations : Tension hachée et pertes par effet Joule (3). Celles pour la conduction continue vont suivre (c’est un gros travail d’édition).
2 octobre 2013, 09:23, par FBE 90
Et bien voila expliqué clairement et de façon détaillée le fonctionnement des MLI ou PWM et des conséquences sur les moteurs. Important pour ceux qui restent en analogique.
Merci.
2 octobre 2013, 10:56, par Jean-Luc
Merci pour ces compliments. C’est également important pour ceux qui sont en numérique. En effet, les décodeurs ont souvent plusieurs fréquences de PWM possibles. Il faut donc faire ces réglages en connaissance cause. De plus, selon les marques et les modèles, la plus haute fréquence possible n’est pas la même. Cela peut être un critère de choix.
13 janvier 2014, 21:40, par railyRabbit
Très clair ! Beau travail