 ModelleisenbahN
ModelleisenbahNCet article est le premier d’une série de 4 traitant de l’alimentation par tension hachée des moteurs électriques de nos locomotives. On entend beaucoup de bêtises sur les forums à ce propos, notamment en ce qui concerne les moteurs à rotor sans fer :
Les moteurs à rotor sans fer n’aiment pas les alimentations à courant pulsé [1]
Comme on va le voir, cette affirmation n’est pas tout à fait vraie. Les choses sont rarement simples et il faut entrer dans les détails pour comprendre.
Un petit mot sur les moteurs à rotor sans fer avant de commencer. Le fonctionnement de ces moteurs n’est pas fondamentalement différent du fonctionnement des moteurs à rotor ferreux. Ça reste une histoire d’aimants et d’électro-aimants qui se repoussent et s’attirent selon le sens du courant et il y a toujours des balais. Du point de vue de leur alimentation, la différence est la faible inductance, L, qu’ils présentent. Bien plus faible que celle des moteurs à rotor ferreux. Pour comprendre ce que ça implique, il va falloir entrer dans les détails et je ne vous cache pas que ça va être compliqué.
Pierre est bien plus compétent que moi pour traiter ce sujet et de plus il l’a déjà traité, je lui laisse la place.
L’alimentation de nos locomotives
L’alimentation des locomotives miniatures en tension hachée est un classique, ce type de tension permettant notamment d’obtenir de meilleurs ralentis. Nous étudions cette alimentation d’un point de vue uniquement orienté vers le bilan de puissance. En effet, la puissance électrique fournie par l’alimentation est transformée par le moteur en puissance mécanique et pertes par effet Joule dans la résistance du moteur.
La puissance mécanique est fonction de la valeur moyenne du courant dans le moteur, tandis que les pertes Joule sont fonction du carré du courant efficace.
Prenons un cas extrême pour illustrer cela : l’alimentation d’un moteur à courant continu avec une tension alternative centrée sur 0 comme celle du secteur. Pour les alternances positives, le moteur devrait tourner dans un sens et pour les alternances négatives dans l’autre sens. Dans les faits le moteur ne tourne pas du tout car le courant change de sens trop vite. Par conséquent, sa puissance mécanique est nulle. Le courant efficace lui n’est pas nul, il provoque des pertes importantes par effet Joule et le moteur chauffe considérablement. En l’occurrence, pour un signal sinusoïdal, il est égal à

De la même manière, une tension hachée peut engendrer un courant dont la valeur moyenne est plus faible que sa valeur efficace : autrement dit, le moteur « chauffe » de manière importante, même sous des allures qui semblent raisonnables. Nous verrons que ceci est particulièrement vrai lorsque la fréquence de hachage est faible et la tension de la source importante. Or, plus un moteur est petit, plus sa résistance électrique est importante, et moins il peut « encaisser » des chocs thermiques.
Dans cet article, nous présentons les principaux résultats pour une tension continue ainsi que le principe de la tension hachée. Le deuxième article présente le fonctionnement avec tension hachée en conduction discontinue et en conduction continue. Les troisième et quatrième sont des annexes techniques détaillant les calculs et les équations employées.
Nous nous plaçons délibérement du point de vue des pertes Joules du moteur. L’agrément de conduite que procure une alimentation n’est pas prise en compte, sauf dans la conclusion.
Pour caractériser un moteur, il suffit de connaître sa résistance R et son inductance L. Pour chaque essai en tension continue pure, il suffit de mesurer la tension aux bornes du moteur et le courant qu’il consomme pour prévoir son comportement sous tension hachée à la même allure.
L’alimentation en tension continue
La seule caractéristique utile du moteur alimenté en tension continue est alors sa résistance R (qui peut être mesurée avec un ohm-mètre).
Alimenté sous une tension continue U, le courant qui le traverse est I, et sa force contre-électromotrice [2] est E ; ces grandeurs sont liées par la relation :

(1)
Le moteur fournit un couple C, et tourne à une vitesse Ω ; on montre :

(2)
En multipliant par I la première relation (1) on obtient (cela va donner la puissance électrique P = UI) :

(3)
Autrement dit : la puissance électrique fournie par la source (U I) est transformée en puissance
mécanique (E I), et en pertes par effet Joule, de la chaleur (R I2).
Par exemple, la locomotive Roco BR 80 (échelle N) a un moteur qui présente une résistance de 13Ω environ [3]. Entraînant huit wagons sous une tension de 7,5V, elle consomme un courant d’environ 355mA.
On en déduit :
- le fcem du moteur : 7,5V - 13Ω × 355mA = 2,89V ;
- la puissance électrique : 7,5V × 355mA = 2,66W ;
- la puissance mécanique fournie : 2,89V × 355mA = 1,02W ;
- les pertes par effet Joule : 13Ω × 355mA × 355mA = 1,64W.
Plus de 60% de la puissance électrique est perdue par effet Joule (c’est très important : un moteur industriel de quelques kW présente habituellement des pertes inférieures à 30%).
La tension hachée
L’alimentation en tension hachée consiste à alimenter en tout ou rien. La tension qui alimente le moteur est soit à 0V, soit à la tension maximum, 12V typiquement, et on alterne périodiquement entre 0V et 12V.
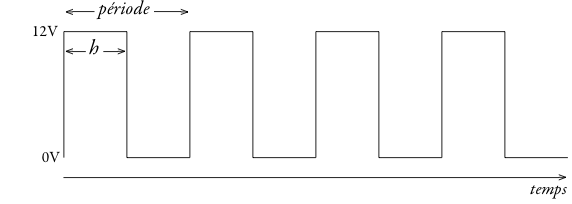
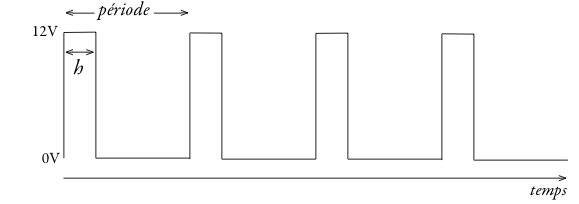
Le rapport de h, temps que l’alimentation passe à la tension maximum, sur la période est appelé le rapport cyclique. On appelle également cela une MLI (Modulation de Largeur d’Impulsion) ou PWM en anglais (Pulse Width Modulation). La variation de vitesse du moteur est obtenue en changeant h. Par exemple, on obtiendra une rotation lente en fixant h à 25% de la période.
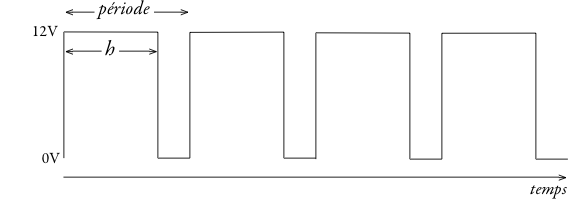
Et une rotation plus rapide en fixant h à 75% de la période.
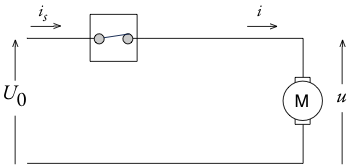
Pour générer ce type d’alimentation, il faut un montage électronique qu’on appelle un hacheur. Le shéma général d’un hacheur est le suivant :
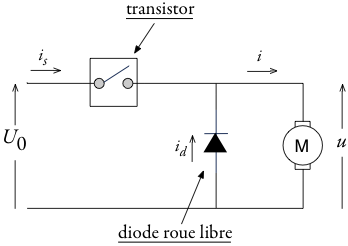
La source délivre une tension constante U0. Le courant instantané dans la source est is. Le courant instantané dans le moteur est i, et la tension instantanée à ses bornes u. Le transistor de puissance est assimilé à un interrupteur idéal (qui s’ouvre et se ferme instantanément, qui ne présente aucune chûte de tension quand il est fermé, et aucun courant de fuite quand il est ouvert). Nous considérons que la diode roue libre présente une tension de seuil non nulle VD [4].
Le rôle du transistor est assez évident. Quand l’interrupteur est fermé le moteur est alimenté, quand il est ouvert, il ne l’est pas. Quand l’interrupteur est fermé, la diode est polarisée en inverse. Elle est donc bloquée et on peut oublier sa présence comme montré dans la figure ci-dessous.
Jusqu’à maintenant c’est relativement simple.
Quand on ouvre l’interrupteur, Ça devient plus compliqué mais ne partez pas tout de suite.
Quand on a examiné l’alimentation à tension continue dans le paragraphe précédent, on a évacué l’inductance du moteur car si la tension est constante, le courant est constant. Et quand le courant est constant, l’inductance de joue aucun rôle.
Ici la tension n’est pas constante et donc le courant ne l’est pas non plus. Par conséquent l’inductance joue un rôle. Et donc le moteur est assimilé au circuit suivant :
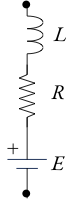
E est la force contre-électromotrice que l’on symbolise par un générateur de tension, R est la résistance du moteur, L est l’inductance.
Une inductance est une sorte de résistance aux variations du courant. Par conséquent, quand on va établir ou couper l’alimentation du moteur, le courant ne va pas suivre instantanément. Il va suivre comme montré à la figure suivante :
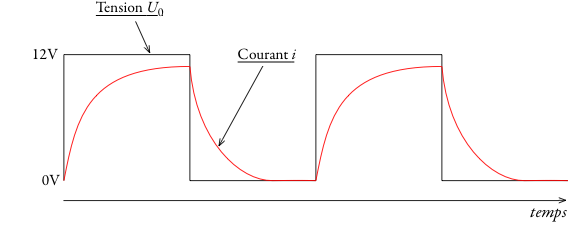
La montée et la descente ne sont pas symétriques. Le courant met plus de temps à croître qu’à décroître, cela vient de la force contre-électromotrice.
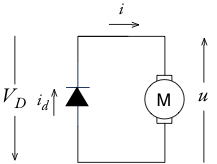
Donc, quand on va couper l’alimentation, le courant i ne va pas être nul immédiatement et il faut bien qu’il aille quelque part. C’est la que la diode entre en jeu. Le circuit équivalent est présenté ci-dessous. Quand on coupe l’alimentation, le courant i va circuler dans la diode et le moteur et il va continuer un certain temps à cause de l’inductance qui résiste à sa variation tandis que la force contre-électromotrice E essaye de faire diminuer le courant. À ce moment la tension aux bornes du moteur est l’inverse de la tension de seuil de la diode : -VD.
Au bout d’un moment le courant devient nul, la force contre-électromotrice E reste seule et apparaît aux bornes du moteur et la diode roue libre se retrouve de nouveau polarisée en inverse et donc plus aucun courant ne circule. Evidemment, on parle ici de durées qui sont très petites devant le temps de réponse de la mécanique et quand la E apparaît aux bornes du moteur, la vitesse de rotation Ω n’a pratiquement pas changé.
Conduction discontinue et conduction continue
Si on hache doucement, disons à 50Hz ou 100Hz, le courant i va effectivement passer de 0 à sa valeur maximum pendant que l’interrupteur est fermé et va redevenir nul pendant que l’interrupteur est ouvert. Il a suffisamment de temps pour le faire. Il se passe ce qui a été décrit dans la section précédent C’est ce qu’on appelle la conduction discontinue.
Par contre, si on hache rapidement, disons 20kHz, le courant i n’aura pas le temps d’atteindre sa valeur maximum lorsque l’interrupteur est fermé, ni le temps d’atteindre 0 quand l’interrupteur est ouvert. C’est ce qu’on appelle la conduction continue.
Ces deux types de conduction font l’objet du prochain article.
Messages
13 septembre 2016, 12:01, par Philippe
Bonjour Messieurs,
Je possède des moteurs d’aiguilles Lemaco commandés actuellement à l’aide d’une alimentation symétrique -9V 0V +9V.
J’aimerai que cette alimentation symétrique sorte du courant haché. Est-ce possible et si oui, ou puis-je trouver un schéma ?
Merci par avance de votre attention et pour le temps que vous pourrez consacrer à cette question.
Philippe
19 septembre 2018, 23:55
Pourquoi la vitesse du moteur augmente-t-elle quand on ajoute la diode de roue libre ?
20 septembre 2018, 08:13, par Jean-Luc
La vitesse n’augmente pas quand on ajoute la diode roue libre
28 mars 2024, 08:54, par Jean-Claude
Merci Pierre et Jean-Luc pour ces explications qui éclaircissent ma compréhension (en autre) du terme FCEM sur les notices des réglages CV des décodeurs.