 ModelleisenbahN
ModelleisenbahNJe viens de terminer de monter une carte d’alimentation 4 cantons avec mes camarades. Nous avons mis 2 jours pleins pour monter 3 cartes, chacun la sienne. Cela représente un travail assez important qu’il va me falloir effectuer encore 8 fois pour mon réseau. Il faut dire qu’il y a plus de 400 composants sur cette carte qui est assez complexe mais fait beaucoup de choses.
La série préliminaire comportait 5 tirages de la carte. 4 sont maintenant montées et vont servir à des essais poussés cet été. La suite sera de lancer la fabrication des exemplaires de la carte définitive pour les 3 réseaux, soit au total une trentaine de cartes.
Chaque carte embarque 4 modules d’alimentation. Les fonctions assurées par un module sont décrites ci-dessous.
Qu’est ce qu’un canton ?
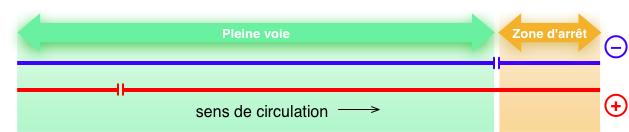
Il ne s’agit évidemment pas exactement de la définition données pour les trains réels. Ici, un canton est une portion de voie alimentée indépendamment. Cela peut correspondre à un canton tel que défini pour les trains réels mais cela peut être aussi une portion beaucoup plus petite comme une traversée de jonction double qui va être toute seule dans son canton. De plus, un canton peut comprendre une section de pleine voie et une zone d’arrêt, et ce dans chaque sens de circulation.
La matérialisation de la section de pleine voie et de la zone d’arrêt est réalisée par une coupure sur le rail gauche vu dans le sens de circulation (c’est à dire le rail de polarité –). Quand le sens de circulation est inversé, le rail (-) devient le rail (+) et la zone d’arrêt passe de l’autre côté du canton. L’anatomie d’un canton est présenté à la figure ci-dessous :
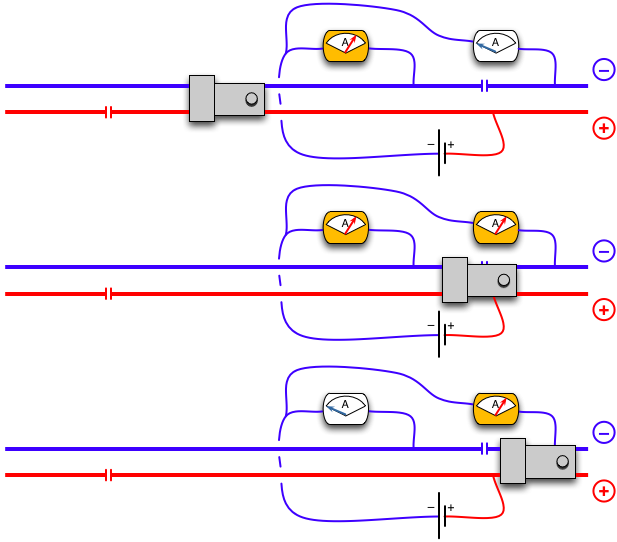
De cette manière, il est possible, moyennant l’électronique adéquate de mesure du courant qui passe par le rail (-), de connaître la position d’une rame à l’intérieur d’un canton : seulement en pleine voie, en pleine voie et en zone d’arrêt, seulement en zone d’arrêt. Ceci est illustré dans la figure suivante :
Pour détecter les wagons, il est nécessaire de graphiter les essieux. En effet, les roues des wagons, bien que pour la plupart métalliques, sont isolées l’une de l’autre. Afin de rendre l’essieu conducteur (modestement), il est graphité (voir A.M.F.N : le graphitage des essieux).
L’alimentation par PWM
L’alimentation des locomotives est faite au moyen d’une PWM [1]. Traditionnellement, les moteurs à courant continue sont alimentés avec une tension que l’on va faire varier pour que le moteur tourne plus ou moins vite. Le problème de ce mode d’alimentation sont les pertes énergétique qui résultent de l’abaissement de la tension.
Avec une PWM, le moteur est alimenté via un signal carré passant alternativement de 0 à la tension d’alimentation maximum. Dans notre cas, ce signal a une fréquence de 20KHz (soit une période de 50µs). Il en résulte que la vitesse du moteur est proportionnelle au rapport entre la portion de temps passée à l’état de tension maximum et la période du signal, c’est à dire ce que l’on appelle le rapport cyclique. Pour changer la vitesse de rotation du moteur, il suffit de changer le rapport cyclique.
La gestion de la PWM est confiée à un micro-contrôleur [2] de type PIC 18F26K80 de Microchip. Le signal émis par le PIC n’est pas suffisant, ni en tension, ni en intensité, pour alimenter le moteur. Il est donc nécessaire de l’amplifier pour attaquer un transistor PMOS qui se chargera de commuter la tension d’alimentation du moteur.
La synchronisation des PWM
Lorsqu’une rame passe d’un canton à un canton adjacent, les deux alimentations sont bien sûr réglées sur la même valeur de manière à ce que la locomotive garde la même vitesse. Ce réglage n’est pas pris en charge implicitement par les modules d’alimentation mais est envoyé aux modules d’alimentation concernés par la carte LPC2294 car seul le logiciel centralisé de gestion du réseau connait le graphe des cantons.
Mais cela ne suffit pas. En effet, le micro-contrôleur PIC de chaque module possède sa propre horloge et va donc synthétiser sa PWM indépendamment de celle des autres PIC. Par conséquent, il n’y a aucune raison pour que les signaux des PWM soient synchrones. Par conséquent, au moment où une locomotive passe d’un canton a un autre, prenant ainsi le courant de traction dans les deux cantons à la fois, elle verra une PWM qui est la superposition de celles des deux cantons et effectuera un bond. La figure ci-dessous illustre ce phénomène.
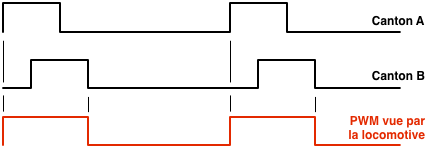
Pour éviter ce comportement disgracieux, il est nécessaire de synchroniser les PWM de tous les modules d’alimentation. À cet effet, le PIC de la carte Mezzanine diffuse un signal de synchronisation à tous les PIC des modules d’alimentation. Ces derniers recalent leur PWM en changeant légèrement
la période en fonction du décalage qu’ils constatent.
À suivre...